
InterNav Open Architecture PNT Solution
Description | Open Architecture Design | Applications | Demonstration
Description
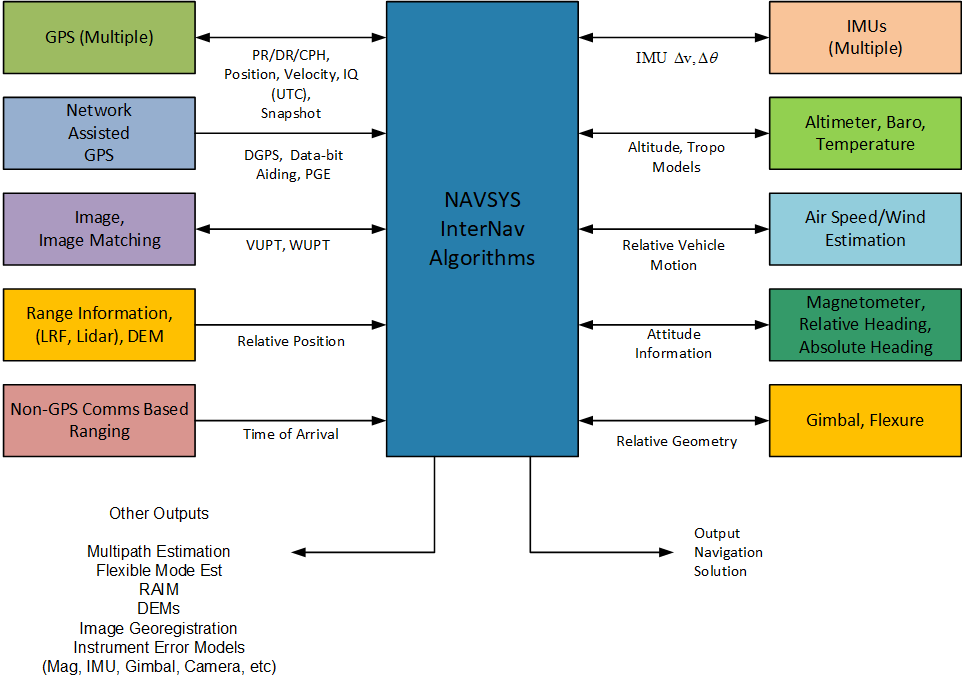
Positioning, navigation, and timing (PNT) applications that need to operate in the absence of GPS require the use of inertial navigation to assure continuity through periods of GPS drop-outs. When GPS is unavailable, the performance of inertial navigation solutions rapidly degrade unless an alternative aiding source is used. InterNav provides an open architecture PNT solution that allows system integrators to select from a suite of sensors to provide updates to the navigation solution using GPS dropouts. This modular navigation system design approach allows selection of the suite of sensors to meet a particular application’s performance, size, weight, power, and cost requirements. InterNav software, with a suite of support products designed to facilitate development, testing, and integration of customized navigation solutions into third party products, is offered under a license agreement.
Open Architecture Design
The InterNav software is programmed in modular, ANSI-compliant C++ code to provide maximum flexibility for integration of different GPS, inertial, and other sensor components through the modular software architecture. Source code is provided that can be used to convert any manufacturer’s IMU data format into the InterNav standard IMU message format. Reference software and firmware is provided to handle interfacing with most of the major IMU manufacturers’ products.
For additional information on how InterNav can accept sensors, request our White Paper.
Click below for to access the paper request form for “InterNav Modular Integrated Inertial Navigation for Assured PNT during GPS Denial”
Applications
InterNav is a cost-effective, high-performance solution for system integrators to embed positioning, navigation and timing into their products. InterNav includes a high-fidelity inertial navigation engine with a sophisticated Kalman filter for precise positioning and alignment. The modular architecture allows integration with multiple vendor’s inertial measurement units (IMUs), a variety of different GPS, and external sensor aiding sources to allow configuration of customized designs optimized for our customer’s performance and size, weight, and power needs. The open architecture provides full control of the integrated navigation solution and source code and reference designs are provided to facilitate system integration and testing.
Inertial navigation using a wide variety of different vendor’s IMUs
GPS integration with both commercial and military receivers
Aided navigation in the event of GPS drop-outs using a variety of sensors
Supports operation inside gimbals with precision sensor attitude determination for geopointing or targeting applications
Includes PNT Hub functionality for sharing PNT data with other systems in standard formats
Precise positioning with DGPS and RTK inertial aided solutions
Demonstration
For additional information contact:
Debbie Westra
info@navsys.com
telephone: 866.462.8797 or 719.481.4289
