
InterNav® Software Development Kit
Description | Sensor Integration and Time-stamping | Supported IMUs and GPS
Description
The InterNav Software Development Kit provides developers with a turn-key software capability for integration of GPS, inertial, and other PNT sensors. InterNav software is ANSI C++ compliant and includes software libraries that couple navigation sensor data to provide 3D highly-precise position, velocity, and attitude determination. The development kit supports VxWorks, Linux, or Windows platforms.
The modular design allows any GPS and IMU sensors to be integrated and source code is provided to allow rapid integration of different components. The InterNav Kalman filter implementation is designed to optimize the performance with various grades of IMU instruments by having the instrument state parameters selectable through a "configuration" file. This configuration file provides the user with the flexibility to configure the overall system to meet customer-specific operational requirements.
Concurrent with the processing of the GPS/IMU data the InterNav system also allows the logging of all input data as well as output data into a binary file format. Tools are provided that allow for post processing of the data with the InterNav software which allows for test data to be re-run multiple times post-test allowing the user to adjust and tune system parameters and reassess results to optimize performance. During GPS drop-outs, inertial aiding can be applied from a variety of different sensors to bound the inertial error growth through the InterNav open architecture design.
The InterNav software development kit includes the following software components which can be used to provide PNT functionality within a system by running the InterNav software on an embedded processor. Run-time licenses for the InterNav software can be purchased on a per-seat basis with quantity discounts available.
InterNav Libraries:
GPS/INS Kalman Filter
INS Utility
Hybrid Navigator
XSVS Position Calculation
Source Code:
NAVSYS framework (Fwk, Configuration, OS, and TimeLib)
Ethernet interface (Ethernet, WebServer)
Configuration files (XML)
GPS and IMU interface software and utilities
Messages (Common, NAV, and RCVR messages)
System Monitor
Data record and playback (MsgRecorder)
MATLAB analysis tools
Sensor Integration and Time-stamping
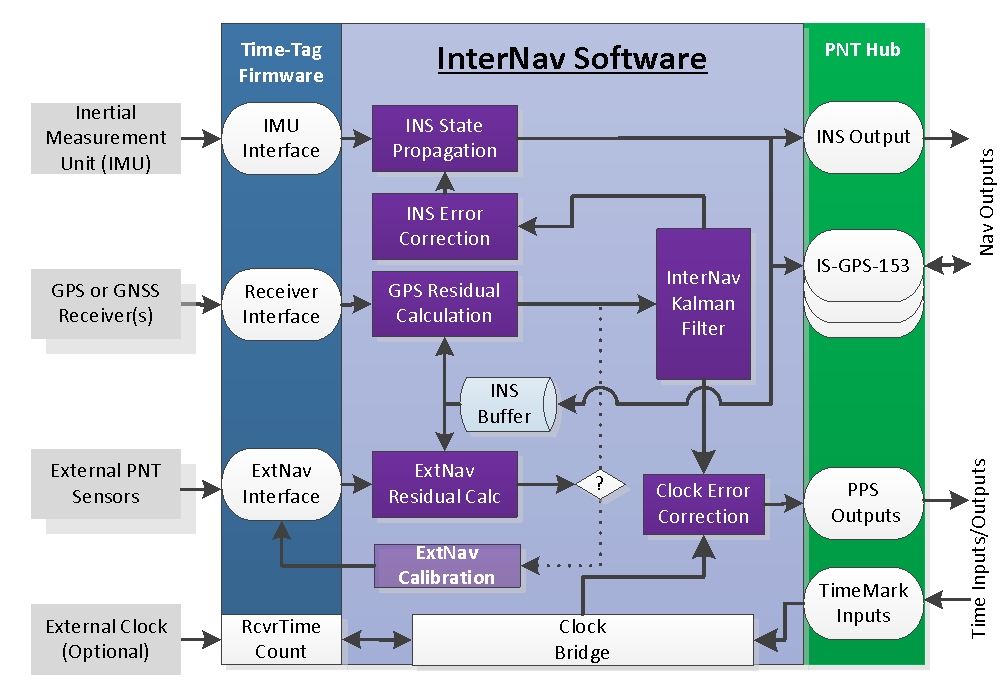
The InterNav software processes the input inertial, GPS, and external sensor data through an open-architecture message format that allows system developers to select their own components for integration. Key to optimizing the performance of the integrated GPS/inertial solution is time-stamping the input sensor data to a common time-reference. InterNav does not require all data to be time-stamped to GPS time but instead allows for time-stamping to a common time reference. The InterNav software will then convert this time internally through the software clock bridge module providing a calibrated time output for use in driving a 1-pps synchronized time-stamp for precise timing applications.
Click below to request a white paper describing best practices for InterNav sensor integration with GPS, inertial and external PNT aiding sources.
Supported IMUs and GPS
A partial list of the IMUs and GPS receivers supported by InterNav is listed below. Interface source code is provided to convert the native formats provided by these units into the InterNav common interface format for inertial and GPS aiding. Any inertial or GPS unit can similarly be integrated by using the source code examples provided to convert data from support a custom sensor interface format to the InterNav common interface messages. Documentation on all standard interface messages supported by InterNav for sensor aiding is delivered with the Software Development Kit.
IMU Interface Source Code:
IS-TNL-167
GPS Interface Source Code
NovAtel
Military GPS: IS-GPS-153 and IS-TNL
Click below to Request a white paper on the different PNT sensor types that are accepted by InterNav.
For additional information contact:
Debbie Westra
info@navsys.com
telephone: 866.462.8797 or 719.481.4289
